Door Bot
Since I've been working from home I've had a small problem that really needed an over-engineered solution. I leave my office door cracked so that the dogs can push it open whenever they want to come in. The problem is that they can't make up their mind and constantly paw at the door to leave and then push it open again 2 minutes later. Over. And over. And over.
I wanted a way to close the door from my desk without walking over to it. I also wanted to be able to open it again when they inevitably want go back out.
Version 1
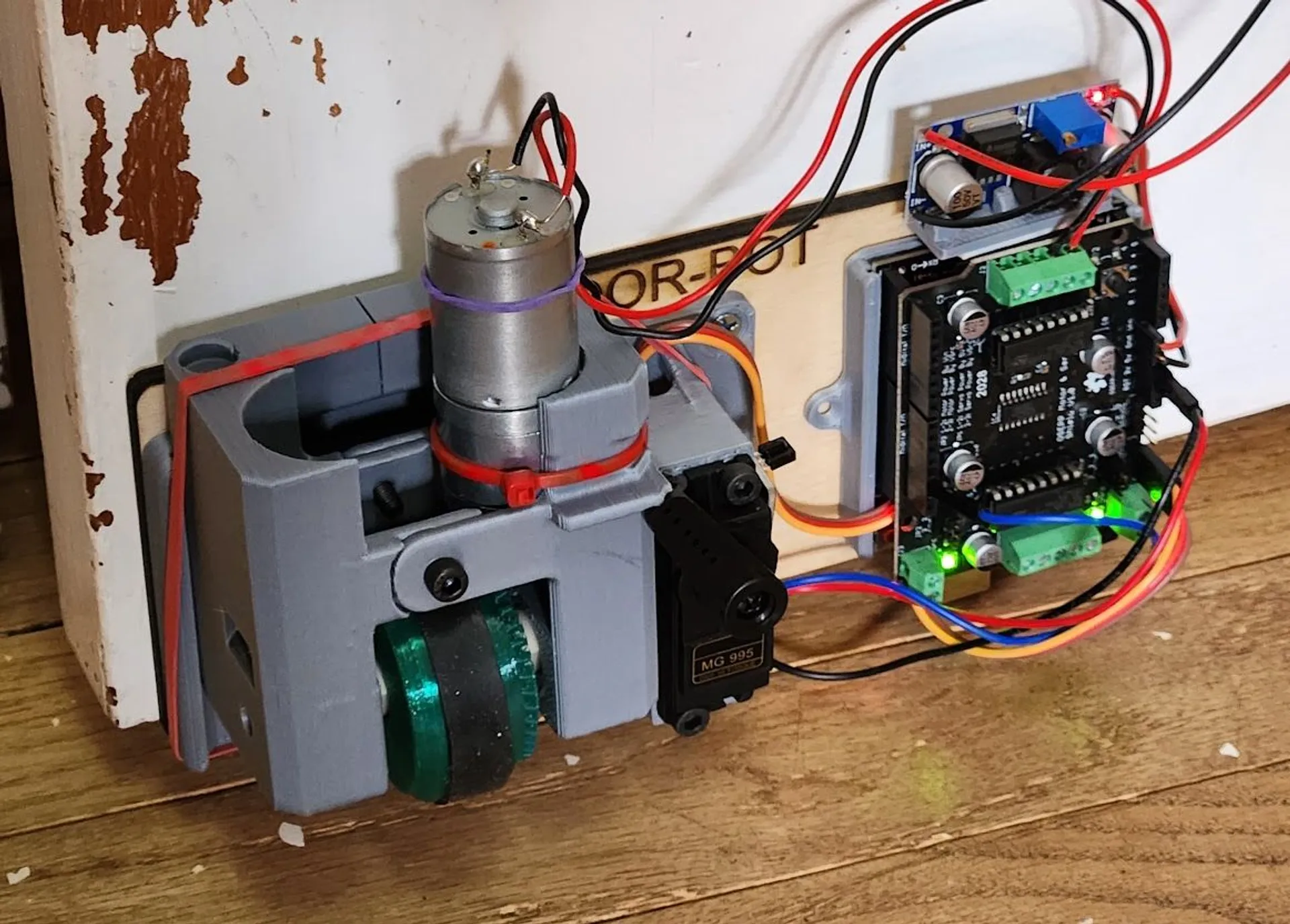
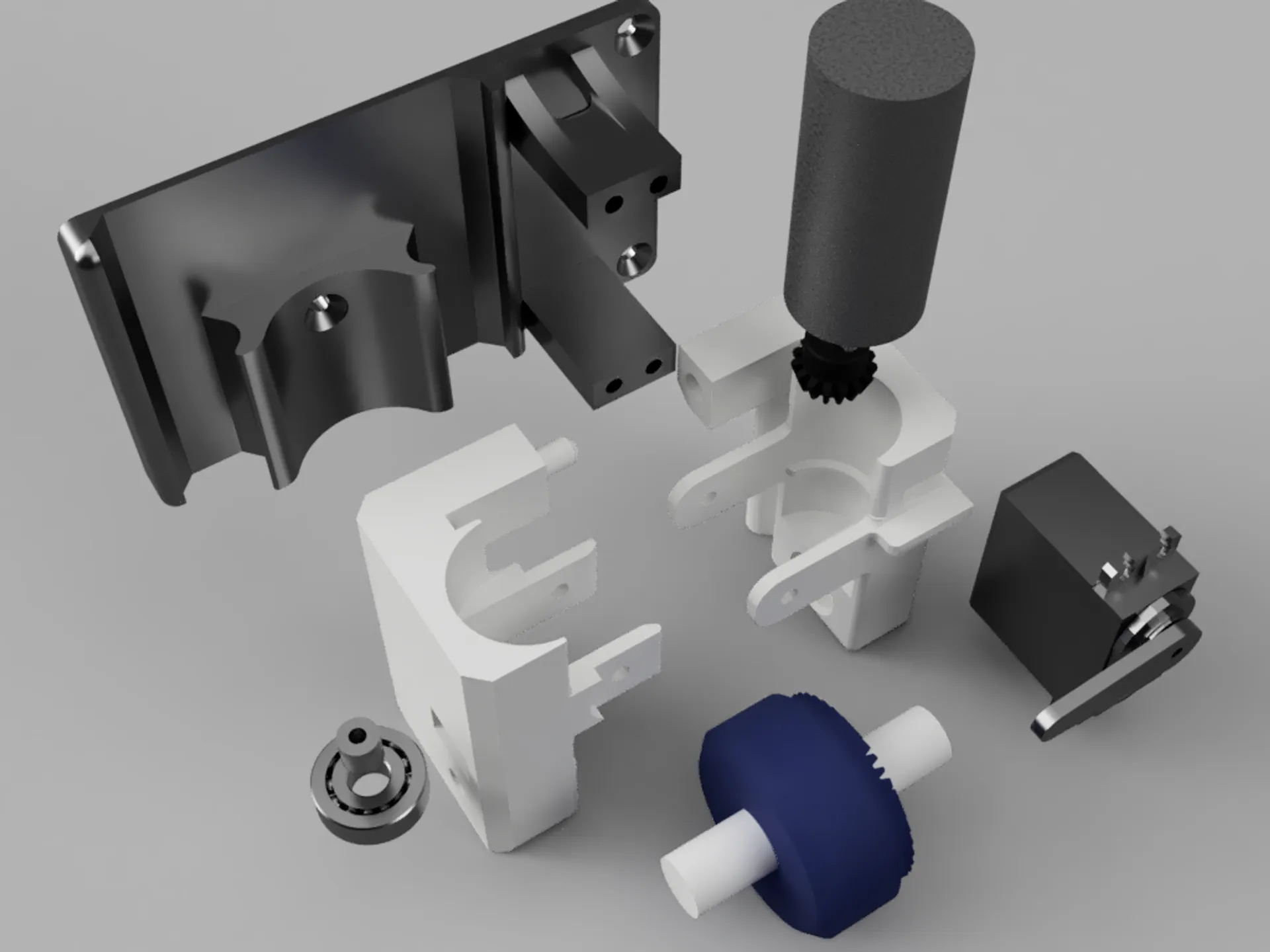
I designed this around an MG995 servo and a geared DC motor I had laying around. The 3D printed housing holds the motor for driving the wheel and servo which is used for lifting the bot off the ground when not in use. I printed the wheel out of TPU which has a bevel gear on one side which engages another bevel gear on the motor. I added a rubber band after the fact to add a small amount of downward force while operating.
For the electronics, I currently have an Arduino with an IR receiver hooked up so I can use my TV remote to open and close the door for them from across the room. I simply mapped forward/reverse to the channel up/down buttons which I don't use. For now, power is provided by a 12v wall adaptor.
Everything gets mounted to a laser cut backboard which makes moving it from the bench to the door a breeze.
This is just a proof of concept and I'm already thinking about what I want from V2.